
Introduction
Real-Time Operating Systems (RTOS) are critical for the development of embedded systems that require precise timing and reliability. This guide will cover essential RTOS concepts, applications, and technical guidance, making it accessible for both beginners and professionals.
1. RTOS (Real-Time Operating System)
An RTOS is an operating system designed to process data as it comes in, typically without buffering delays. It ensures that high-priority tasks are executed within a defined time constraint, making it ideal for time-sensitive applications.
Key Features of RTOS
Determinism
Guarantees a predictable response to events within a specified time.
Low Latency
Minimal delay in task switching and interrupt handling.
Reliability
High reliability and robustness, crucial for critical applications.
Types of RTOS
– Hard Real-Time Systems
Systems where missing a deadline could cause catastrophic failure.
– Soft Real-Time Systems
Systems where deadlines are important but not absolute.
Example Use Cases
– Automotive systems (e.g., anti-lock braking systems)
– Industrial automation (e.g., robotic controllers)
– Medical devices (e.g., pacemakers)
2. RTOS Development
RTOS development involves creating software that can handle real-time constraints. Developers must understand the hardware, timing requirements, and how to manage system resources effectively.
Key Steps in RTOS Development
– Requirement Analysis
Define the system’s real-time requirements.
– System Design
Design the system architecture, including task prioritization and resource management.
– Implementation
Write the code, considering real-time constraints.
– Testing and Debugging
Test the system under various conditions to ensure it meets real-time requirements.
Best Practices in RTOS Development
– Modular Design
Break down the system into smaller, manageable modules.
– Code Optimization
Write efficient code to minimize execution time.
– Real-Time Analysis
Use tools to analyze and verify real-time performance.
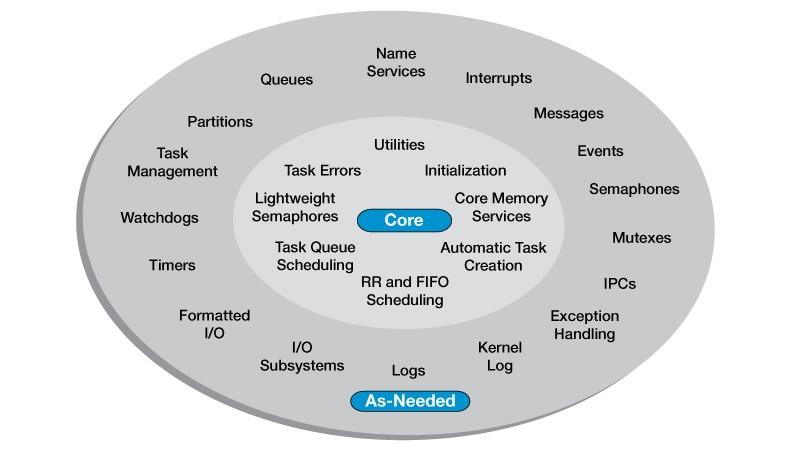
3. RTOS Architecture
The architecture of an RTOS typically includes a kernel, task scheduler, inter-task communication mechanisms, and memory management. Understanding these components is crucial for designing efficient real-time applications.
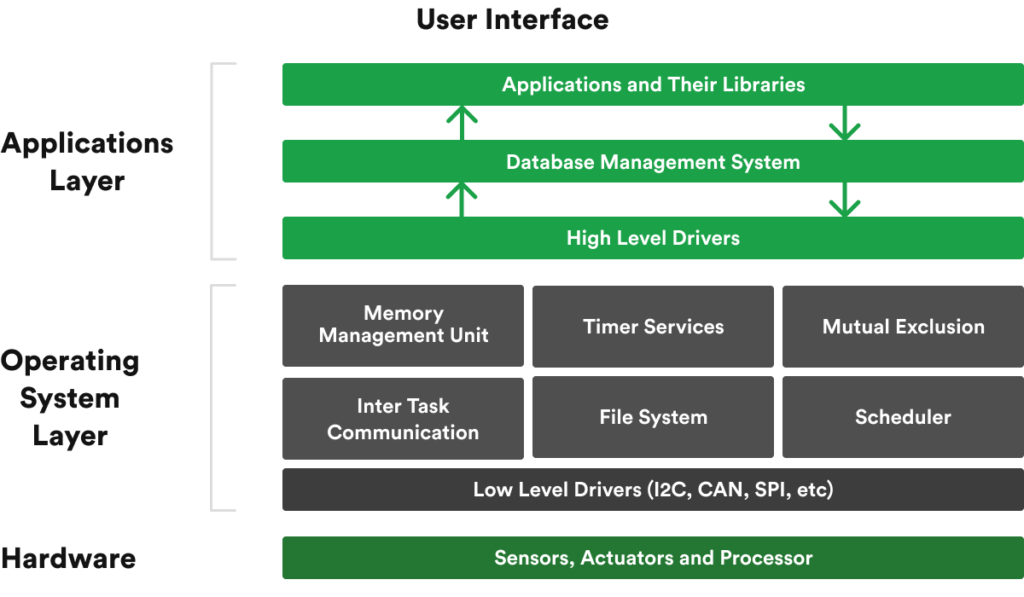
Key Components
– Kernel
The core of the RTOS, managing tasks and resources.
– Task Scheduler
Determines the order in which tasks are executed.
– Inter-Task Communication (ITC)
Mechanisms like semaphores, message queues, and event flags for task synchronization.
– Memory Management
Efficient allocation and management of memory resources.
Architectural Models
– Monolithic Kernel
All system services are included in the kernel.
– Microkernel
Minimal kernel with basic services, with additional services running in user space.
4. RTOS Applications
RTOS are used in various fields like automotive systems, medical devices, industrial control systems, and consumer electronics. Each application has specific timing and reliability requirements.
Automotive Systems
– Engine Control Units (ECUs)
– Advanced Driver Assistance Systems (ADAS)
– Infotainment Systems
Medical Devices
– Pacemakers
– Infusion Pumps
– Patient Monitoring Systems
Industrial Control Systems
– Robotic Controllers
Consumer Electronics
– Smartphones
– Wearables
– Smart Home Devices
5. RTOS vs. General-Purpose OS
Unlike general-purpose operating systems (GPOS), RTOS are optimized for real-time applications. They have deterministic task scheduling, minimal latency, and are designed to meet strict timing constraints.
Key Differences
– Determinism
RTOS provides guaranteed response times, while GPOS are designed for throughput and user interaction.
– Task Scheduling
RTOS uses priority-based scheduling, while GPOS uses time-sharing.
– Resource Management
RTOS has more predictable resource management, critical for real-time tasks.
Example Comparison:
– RTOS: FreeRTOS, VxWorks, QNX
– GPOS: Windows, Linux, macOS
6. RTOS Scheduling Algorithms
Scheduling algorithms in RTOS determine the order and timing in which tasks are executed. Common algorithms include Fixed-Priority Scheduling, Round-Robin Scheduling, and Earliest Deadline First (EDF).
Fixed-Priority Scheduling
– Tasks are assigned fixed priorities.
– The scheduler always runs the highest-priority task that is ready.
Round-Robin Scheduling
– Each task gets an equal share of the CPU time.
– Tasks are executed in a circular order.
Earliest Deadline First (EDF)
– Tasks are scheduled based on their deadlines.
– The task with the closest deadline is executed first.
Choosing the Right Algorithm
– Fixed-Priority
Suitable for systems with critical tasks that have higher priority.
– Round-Robin
Good for systems where fairness is important.
– EDF
Ideal for systems with dynamic task deadlines.
7. RTOS Performance Optimization
Optimizing RTOS performance involves minimizing task switching time, reducing latency, and efficiently managing resources. Techniques include priority inversion handling, optimizing interrupt handling, and using lightweight tasks.
Key Techniques
– Minimize Context Switching
Reduce the frequency and overhead of switching between tasks.
– Optimize Interrupt Handling
Use fast interrupt routines and minimize the time spent in interrupt service routines (ISRs).
– Priority Inversion Handling
Use priority inheritance or ceiling protocols to prevent lower-priority tasks from blocking higher-priority ones.
Tools for Optimization
– Performance Analyzers
Tools like Tracealyzer for visualizing and optimizing task execution.
– Profiling Tools
Instruments to measure execution time and identify bottlenecks.
8. Embedded Systems RTOS
Embedded systems RTOS are specialized for small, resource-constrained devices. They need to be lightweight, efficient, and capable of running on minimal hardware.
Characteristics:
– Lightweight
Minimal memory footprint and low CPU usage.
– Efficient
Optimized for limited resources.
– Scalable
Can be scaled down for simple applications or scaled up for complex ones.
Examples
– FreeRTOS
Widely used in microcontroller-based systems.
– ChibiOS
Lightweight and efficient, suitable for small devices.
– uC/OS-II
Certified and reliable, used in safety-critical applications.
9. RTOS Multitasking
RTOS multitasking allows multiple tasks to run concurrently, with the system managing task priorities and execution. This is essential for applications where multiple processes need to happen simultaneously without delay.
Key Concepts
– Tasks
Independent units of execution with their own context.
– Context Switching
The process of switching the CPU from one task to another.
– Task Priorities
Determines the order in which tasks are executed.
Multitasking Models
– Cooperative Multitasking
Tasks voluntarily yield control to the scheduler.
– Preemptive Multitasking
The scheduler forcibly switches tasks based on priority.
10. RTOS Real-Time Scheduling
Real-time scheduling ensures that tasks are completed within their deadline. It involves setting task priorities, deadlines, and using algorithms to ensure timely execution.
Scheduling Types
– Static Scheduling
Task schedules are determined at compile time.
– Dynamic Scheduling
Task schedules are determined at runtime based on priorities and deadlines.
Scheduling Challenges
– Resource Conflicts
Managing access to shared resources.
– Deadlock Avoidance
Ensuring tasks do not enter a state where they are waiting indefinitely for resources.
Techniques
– Rate Monotonic Scheduling (RMS)
Fixed-priority algorithm where shorter tasks have higher priority.
– Deadline Monotonic Scheduling (DMS)
Fixed-priority algorithm where tasks with earlier deadlines have higher priority.
11. RTOS Kernel
The kernel is the core of an RTOS, managing task scheduling, inter-task communication, and resource allocation. It ensures that the system meets real-time requirements.
Kernel Functions
– Task Management
Creating, deleting, and managing tasks.
– Scheduling
Determining which task to run next.
– Inter-Task Communication
Managing semaphores, message queues, and other communication mechanisms.
– Memory Management
Allocating and deallocating memory for tasks.
Kernel Types
– Monolithic Kernel
All system services are included within the kernel.
– Microkernel
Minimal kernel with only essential services, with additional services running in user space.
12. RTOS Design Patterns
Design patterns in RTOS help in solving common problems efficiently. Examples include the State Machine pattern for managing states and the Observer pattern for event handling.
Common Patterns
– State Machine Pattern
Used to manage different states of a system.
– Observer Pattern
Used for event handling and notifying multiple tasks of changes.
– Producer-Consumer Pattern
Used for managing data flow between tasks.
Benefits
– Reusability
Patterns can be reused across different projects.
– Scalability
Patterns help in scaling the system efficiently.
– Maintainability
Patterns make the code easier to understand and maintain.
13. RTOS for IoT
RTOS are ideal for IoT devices, providing the real-time performance required for data processing and communication. They ensure reliable and timely data handling in connected devices.
Key Requirements for IoT RTOS
– Low Power Consumption
Essential for battery-powered devices.
– Connectivity
Support for various communication protocols like MQTT, CoAP, and HTTP.
– Security
Robust security features to protect data and device integrity.
Popular IoT RTOS
– FreeRTOS
Widely used in IoT devices, with extensive community
– Function
Control robotic arms and movements with high precision.
– RTOS Role
Ensure precise timing and coordination of robotic actions.
SCADA Systems:
– Function
Monitor and control industrial processes and equipment.
– RTOS Role
Provide real-time data acquisition and control capabilities.
Programmable Logic Controllers (PLCs):
– Function
Control machinery and processes in industrial environments.
– RTOS Role
Ensure precise timing and reliable operation of control logic.
Example Code:
```c
// Robotic arm control task
void vRoboticArmControlTask(void *pvParameters) {
for(;;) {
// Control robotic arm movements
control_robotic_arm();
// Delay for a period
vTaskDelay(pdMS_TO_TICKS(50));
}
}
// Main function
int main(void) {
// Create robotic arm control task
xTaskCreate(vRoboticArmControlTask, "RoboticArmControl", 1000, NULL, 1, NULL);
// Start the scheduler
vTaskStartScheduler();
// Should never reach here
for(;;);
}
```Best Practices:
– Ensure Precision
Implement precise control algorithms.
– Monitor Performance
Monitor system performance and optimize as needed.
– Test Rigorously
Test the system thoroughly under various conditions.
Conclusion
By delving into the intricacies of Real-Time Operating Systems, this guide has provided a comprehensive overview of essential concepts and practical applications. From understanding RTOS fundamentals to exploring advanced topics like scheduling and optimization, readers now possess the knowledge to make informed decisions when developing embedded systems. With a strong grasp of RTOS, engineers and developers can confidently create reliable, efficient, and high-performance solutions for a wide range of industries.